摘要:科学家们已经研制出一种机器人晶体,它可以像毛毛虫一样慢慢地行走,并且能滚动前进,比行走速度快2万倍。这些能自主移动的有机晶体作为未来柔性机器人的材料将具有巨大潜力。
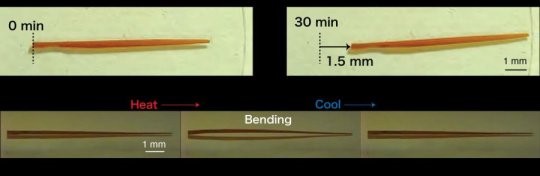
机器人晶体尺蠖般行走。 图片来源:早稻田大学
早稻田大学的科学家们已经逐渐接近制造出柔性机器人来照顾人的目的了。 但是,它使用的材料可能是你想象不到的。
他们研制出了机器人晶体,它可以像毛毛虫一样慢慢地行走,滚动速度比行走速度快2万倍。这些能自主移动的有机晶体作为未来柔性机器人的材料具有巨大的潜力,特别是在医疗领域。
早稻田纳米与生命创新研究组织的座客教授Hideko Koshima说:“晶体较灵活、耐用且轻便。它们可以用作在微观区域输送物质的微型机器人材料,例如携带不育症治疗的卵细胞或进行侵入性手术。”
他们的研究发表在Nature Communications杂志上。
预计晶体将作为柔性机器人的机车材料发挥重要作用,其机械运动已经在弯曲和膨胀、收缩方面进行了探索。然而,真正发挥出作用还要要求更多的动作。
此前在2016年,Koshima的研究小组报告说,近期研究中也使用的手性偶氮苯晶体在暴露于光线下弯曲。在这次研究中,发现晶体在145℃发生相变而不会断裂,即使在反复加热和冷却之后也是如此。
基于这些发现,他们设计了机器人晶体,演示了两种不同的运动模式:步行和滚动。
该团队使用红外热成像相机和数字光学显微镜观察到,纵向厚度梯度的薄而长的板状晶体通过在转变温度附近的加热和冷却循环下反复弯曲和矫直,在热板上过渡温度附近,在30分钟内可以移动1.5mm。另一方面,宽度梯度较薄的较长板状晶体能在0.2秒内滚动3.1mm,通过倾斜弯曲然后翻转而加速,只有一个加热和冷却过程。
Koshima解释说:“行走和滚动运动背后的驱动力来自晶体的不对称形状。”
尽管科学家需要进一步研究如何精确控制机器人晶体的实际应用方向和速度,但这一发现为晶体机器人新领域打开了一扇大门,并且在更大范围内使我们更接近寻址与人口老龄化有关的问题。
Koshima指出:“现在的机器人僵硬沉重,并不适合与人类进行互动,我们的晶体可以用作一种新型的柔性机器人材料,它具有更高的安全性和舒适性,随着我们社会年龄的增长,我们必须考虑人与机器人之间的共生关系,因为机器人可能会照顾人,包括老年人在不远的将来。”
现在正在尝试生产在超低温度下发生相变的机器人晶体。
原文题目:Robotic crystals that walk n’ roll Great potential as soft robotic material of the future
化学慧纳米材料系列产品